

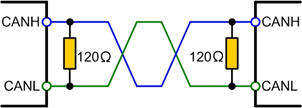
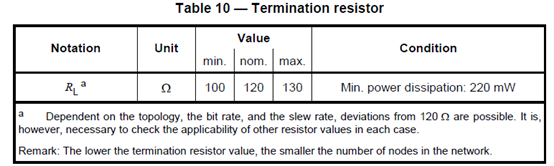
โดยทั่วไปแล้ว ความต้านทานของเทอร์มินัลบัส CAN จะอยู่ที่ 120 โอห์ม อันที่จริงแล้ว เมื่อออกแบบ จะมีสายต้านทาน 60 โอห์มอยู่สองเส้น และโดยทั่วไปจะมีโหนด 120 โอห์มอยู่สองโหนดบนบัส โดยทั่วไปแล้ว คนที่มีความรู้เกี่ยวกับบัส CAN บ้างก็จะมีความรู้อยู่บ้าง ทุกคนรู้เรื่องนี้
ความต้านทานของเทอร์มินัลบัส CAN มีผลกระทบสามประการ:
1. ปรับปรุงความสามารถในการป้องกันการรบกวน ปล่อยให้สัญญาณความถี่สูงและพลังงานต่ำผ่านไปอย่างรวดเร็ว
2. ให้แน่ใจว่าบัสเข้าสู่สถานะซ่อนอย่างรวดเร็ว เพื่อให้พลังงานของตัวเก็บประจุปรสิตไปเร็วขึ้น
3. ปรับปรุงคุณภาพสัญญาณและวางไว้ที่ปลายทั้งสองข้างของบัสเพื่อลดพลังงานการสะท้อน
1. ปรับปรุงความสามารถในการป้องกันการรบกวน
บัส CAN มีสองสถานะ ได้แก่ "ชัดเจน" และ "ซ่อน" สถานะ "ด่วน" แทน "0" และ "ซ่อน" แทน "1" ซึ่งกำหนดโดยตัวรับส่งสัญญาณ CAN ภาพด้านล่างแสดงแผนภาพโครงสร้างภายในทั่วไปของตัวรับส่งสัญญาณ CAN และบัสเชื่อมต่อ Canh และ Canl
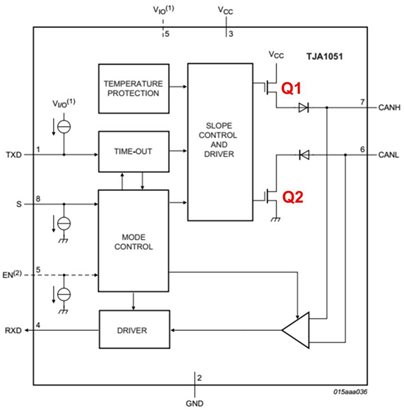
เมื่อบัสชัดเจน Q1 และ Q2 ภายในจะเปิดขึ้น และความแตกต่างของแรงดันระหว่างกระป๋องกับกระป๋อง เมื่อ Q1 และ Q2 ถูกตัดออก Canh และ Canl จะอยู่ในสถานะพาสซีฟที่มีความแตกต่างของแรงดันเท่ากับ 0
หากไม่มีโหลดในบัส ค่าความต้านทานของความแตกต่างของเวลาแฝงจะมีค่าสูงมาก หลอด MOS ภายในเป็นสถานะความต้านทานสูง การรบกวนจากภายนอกต้องการพลังงานเพียงเล็กน้อยเพื่อให้บัสเข้าสู่สถานะที่ชัดเจน (แรงดันไฟฟ้าขั้นต่ำของส่วนทั่วไปของตัวรับส่งสัญญาณ เพียง 500mV) ในเวลานี้ หากมีการรบกวนแบบจำลองที่แตกต่างกัน จะเกิดความผันผวนบนบัสอย่างชัดเจน และไม่มีพื้นที่ให้ความผันผวนเหล่านี้ดูดซับ และจะสร้างตำแหน่งที่ชัดเจนบนบัส
ดังนั้น เพื่อเพิ่มความสามารถในการป้องกันการรบกวนของบัสที่ซ่อนอยู่ จึงสามารถเพิ่มความต้านทานโหลดที่แตกต่างกัน และค่าความต้านทานจะต้องน้อยที่สุดเท่าที่จะเป็นไปได้เพื่อป้องกันผลกระทบจากพลังงานรบกวนส่วนใหญ่ อย่างไรก็ตาม เพื่อหลีกเลี่ยงไม่ให้บัสกระแสเกินเข้าไปยังค่าที่กำหนด ค่าความต้านทานจะต้องไม่ต่ำเกินไป
2. ให้แน่ใจว่าเข้าสู่สถานะที่ซ่อนอยู่ได้อย่างรวดเร็ว
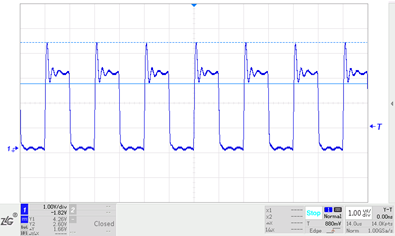
ในสถานะที่ชัดเจน ตัวเก็บประจุปรสิตของบัสจะถูกชาร์จ และตัวเก็บประจุเหล่านี้จำเป็นต้องถูกคายประจุเมื่อกลับสู่สถานะซ่อน หากไม่มีการวางโหลดความต้านทานระหว่าง CANH และ Canl ความจุจะถูกเทโดยความต้านทานที่แตกต่างกันภายในตัวรับส่งสัญญาณเท่านั้น อิมพีแดนซ์นี้ค่อนข้างสูง ตามลักษณะของวงจรกรอง RC เวลาในการคายประจุจะนานขึ้นอย่างมาก เราเพิ่มตัวเก็บประจุ 220pf ระหว่าง Canh และ Canl ของตัวรับส่งสัญญาณสำหรับการทดสอบแบบอะนาล็อก อัตราตำแหน่งคือ 500kbit/s รูปคลื่นแสดงในรูป การลดลงของรูปคลื่นนี้เป็นสถานะที่ค่อนข้างยาว
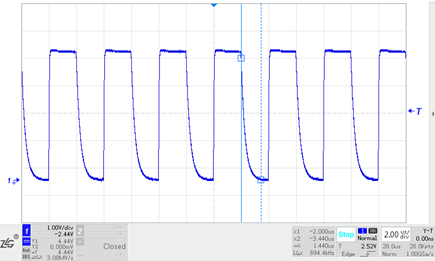
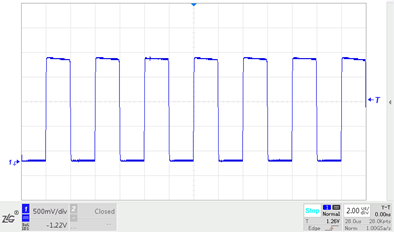
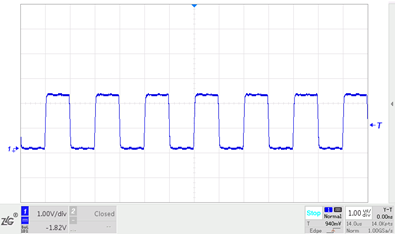
เพื่อปล่อยประจุตัวเก็บประจุปรสิตของบัสอย่างรวดเร็วและเพื่อให้แน่ใจว่าบัสเข้าสู่สถานะซ่อนเร้นอย่างรวดเร็ว จำเป็นต้องวางตัวต้านทานโหลดไว้ระหว่าง CANH และ Canl หลังจากเพิ่ม 60Ω ตัวต้านทาน รูปคลื่นแสดงดังรูป จากรูป เวลาที่สัญญาณชัดแจ้งกลับสู่ภาวะถดถอยลดลงเหลือ 128 นาโนวินาที ซึ่งเทียบเท่ากับเวลาเริ่มต้นของสัญญาณชัดแจ้ง
3. ปรับปรุงคุณภาพสัญญาณ
เมื่อสัญญาณมีอัตราการแปลงสูง พลังงานขอบสัญญาณจะสร้างการสะท้อนของสัญญาณเมื่อค่าอิมพีแดนซ์ไม่ตรงกัน โครงสร้างทางเรขาคณิตของหน้าตัดสายเคเบิลส่งสัญญาณจะเปลี่ยนแปลงไป ลักษณะของสายเคเบิลก็จะเปลี่ยนไปด้วย และการสะท้อนก็จะทำให้เกิดการสะท้อนเช่นกัน
เมื่อพลังงานถูกสะท้อน รูปคลื่นที่ทำให้เกิดการสะท้อนจะซ้อนทับกับรูปคลื่นเดิม ซึ่งจะทำให้เกิดเสียงระฆัง
ที่ปลายสายบัส การเปลี่ยนแปลงอิมพีแดนซ์อย่างรวดเร็วทำให้เกิดการสะท้อนพลังงานที่ขอบสัญญาณ และทำให้เกิดเสียงระฆังบนสัญญาณบัส หากเสียงระฆังมีขนาดใหญ่เกินไป จะส่งผลกระทบต่อคุณภาพการสื่อสาร สามารถเพิ่มตัวต้านทานเทอร์มินัลที่มีค่าอิมพีแดนซ์เท่ากับคุณสมบัติของสายเคเบิลที่ปลายสาย ซึ่งจะช่วยดูดซับพลังงานส่วนนี้และหลีกเลี่ยงการเกิดเสียงระฆัง
คนอื่นๆ ได้ทำการทดสอบแบบอะนาล็อก (ฉันคัดลอกรูปภาพมา) อัตราตำแหน่งอยู่ที่ 1MBIT/s เครื่องส่งสัญญาณ Canh และ Canl เชื่อมต่อสายบิดเกลียวประมาณ 10 เมตร และทรานซิสเตอร์เชื่อมต่อกับ 120Ω ตัวต้านทานเพื่อให้แน่ใจว่ามีเวลาการแปลงที่ซ่อนอยู่ ไม่มีโหลดที่ปลาย รูปคลื่นสัญญาณปลายแสดงไว้ในรูป และขอบสัญญาณขาขึ้นจะปรากฏเป็นเสียงระฆัง
ถ้า 120Ω เพิ่มตัวต้านทานที่ปลายสายบิดเกลียว ทำให้รูปคลื่นสัญญาณปลายสายได้รับการปรับปรุงอย่างมีนัยสำคัญ และกระดิ่งก็หายไป
โดยทั่วไปแล้ว ในโทโพโลยีแบบเส้นตรง ปลายทั้งสองข้างของสายเคเบิลจะเป็นทั้งฝั่งส่งและฝั่งรับ ดังนั้น จึงต้องเพิ่มความต้านทานขั้วหนึ่งที่ปลายทั้งสองข้างของสายเคเบิล
ในกระบวนการใช้งานจริง บัส CAN โดยทั่วไปไม่ใช่การออกแบบบัสที่สมบูรณ์แบบ หลายครั้งมักมีโครงสร้างแบบผสมระหว่างบัสและสตาร์บัส โครงสร้างมาตรฐานของบัส CAN แบบอะนาล็อก
ทำไมต้องเลือก 120Ω?
อิมพีแดนซ์คืออะไร? ในวิทยาศาสตร์ไฟฟ้า อุปสรรคต่อกระแสไฟฟ้าในวงจรมักเรียกว่าอิมพีแดนซ์ หน่วยอิมพีแดนซ์คือโอห์ม ซึ่งมักใช้โดย Z ซึ่งเป็นพหูพจน์ z = r+i (ωl -1/(ωc)). โดยเฉพาะอย่างยิ่ง อิมพีแดนซ์สามารถแบ่งได้เป็นสองส่วน คือ ความต้านทาน (ส่วนจริง) และความต้านทานไฟฟ้า (ส่วนเสมือน) ความต้านทานไฟฟ้ายังรวมถึงค่าความจุและความต้านทานทางประสาทสัมผัส กระแสไฟฟ้าที่เกิดจากตัวเก็บประจุเรียกว่าค่าความจุ และกระแสไฟฟ้าที่เกิดจากความเหนี่ยวนำเรียกว่าความต้านทานทางประสาทสัมผัส อิมพีแดนซ์ในที่นี้หมายถึงแบบหล่อของ Z
ความต้านทานเฉพาะของสายเคเบิลใดๆ สามารถหาได้จากการทดลอง ปลายด้านหนึ่งของสายเคเบิลมีเครื่องกำเนิดคลื่นสี่เหลี่ยม ปลายอีกด้านหนึ่งเชื่อมต่อกับตัวต้านทานแบบปรับได้ และสังเกตรูปคลื่นของความต้านทานผ่านออสซิลโลสโคป ปรับขนาดของค่าความต้านทานจนกระทั่งสัญญาณบนความต้านทานเป็นคลื่นสี่เหลี่ยมที่ไม่มีเสียงระฆังที่ดี ซึ่งได้แก่ การจับคู่อิมพีแดนซ์และความสมบูรณ์ของสัญญาณ ณ จุดนี้ ค่าความต้านทานจะถือว่าสอดคล้องกับคุณลักษณะของสายเคเบิล
ใช้สายเคเบิลทั่วไปสองเส้นที่รถสองคันใช้บิดเป็นเส้นบิด และค่าอิมพีแดนซ์คุณลักษณะสามารถหาได้จากวิธีการข้างต้นที่ประมาณ 120Ωนี่คือค่าความต้านทานขั้วไฟฟ้าที่มาตรฐาน CAN แนะนำ ดังนั้นจึงไม่ได้คำนวณจากลักษณะเฉพาะของลำแสงสายไฟฟ้าจริง แน่นอนว่ามีคำจำกัดความอยู่ในมาตรฐาน ISO 11898-2
ทำไมผมต้องเลือก 0.25W?
ต้องคำนวณค่านี้ร่วมกับสถานะความล้มเหลวบางอย่าง อินเทอร์เฟซทั้งหมดของ ECU ของรถยนต์ต้องพิจารณาการลัดวงจรไปยังแหล่งจ่ายไฟและลัดวงจรไปยังกราวด์ ดังนั้นเราจึงต้องพิจารณาการลัดวงจรไปยังแหล่งจ่ายไฟของบัส CAN ด้วย ตามมาตรฐาน เราต้องพิจารณาการลัดวงจรไปยัง 18V สมมติว่า CANH ลัดวงจรไปยัง 18V กระแสไฟฟ้าจะไหลไปยัง Canl ผ่านความต้านทานที่ขั้ว และเนื่องจากกำลังไฟฟ้าของ 120Ω ตัวต้านทานคือ 50mA*50mA*120Ω = 0.3W เมื่อพิจารณาการลดปริมาณที่อุณหภูมิสูง กำลังของความต้านทานที่ขั้วคือ 0.5W
เวลาโพสต์: 5 ก.ค. 2566





